第一作者:李逸洲
通讯作者:陈智明、罗坚义
背景介绍及内容概述
触觉在信息获取中起着重要的作用,即使没有视觉,也可以通过触觉获取复杂的信息。为了模仿人类手指的触觉感知,各种各样的触觉传感器已经被开发出来并应用在生物机器人上,以获取外界的信息。具有触觉感知的生物机器人目前主要关注物体的表面信息,如形状、表面纹理以及表面材料的刚度和柔软度。配备触觉传感器的生物机器人可以模拟人类来感知物体的表面特征信息,但从材料中获取表层下信息仍然具有挑战性。目前对表层下信息的获取主要还是来自于光学途径,与人类视觉类似,光学CT可以在透明介质下识别具有不同光学特征参数的材料。然而,由于大多数介质的透过率较低,光学CT的实际应用存在一定的局限性。作为视觉的替代或补偿,触觉可以与生物机器人兼容,为获取材料的表层下或内部信息提供另一种策略。
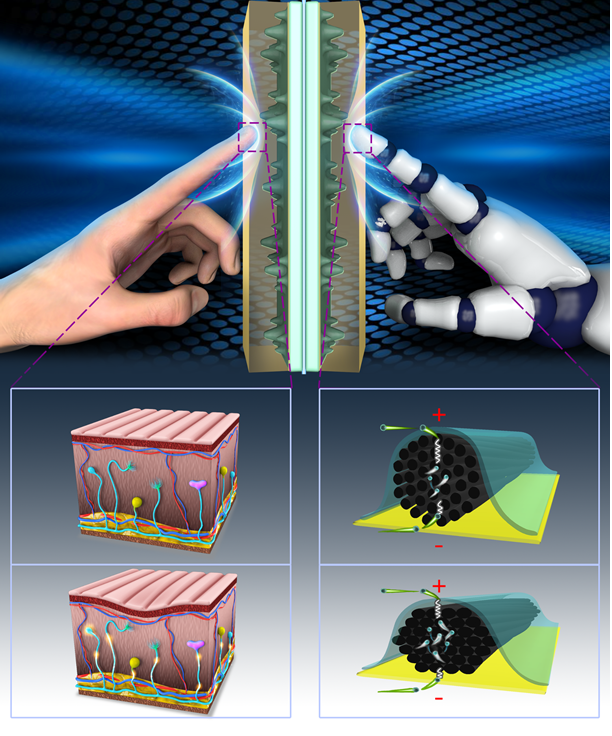
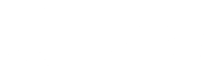
图1 人类手指和仿生手指的触觉感知机制
近日,五邑大学应用物理与材料学院、柔性传感材料与器件研究开发中心陈智明博士、罗坚义教授团队在一种具有触觉断层扫描功能的智能仿生手指研究方面取得重要进展。研究人员针对人类手指触摸软体材料这一过程特点,提出了一种配备力反馈系统的仿生手指,其具有独特的触觉断层扫描能力。基于碳纤维束的横向压敏特性,制备出一种对力极其敏感的触觉传感器,并围绕触觉传感器构建了一个手指模型,指尖用于传感器获取外界压力信号。仿生手指基于触觉反馈系统,可以定量地对力做出反应,使仿生手指能够感知材料表层下的特征,例如表层下的形态和不同柔软程度的内部物体。利用仿生手指重建了不同材料的切片图像,证明了通过设置多个不同阈值可以实现次表面触觉层析成像。这种基于碳纤维束和具备力反馈系统的仿生手指在软体材料识别测试中具有很大的应用前景。这一原创性工作及其相关成果以“A smart bionic finger for subsurface tactile-tomography”为题发表于著名期刊Cell旗下物质科学子刊Cell Reports Physical Science上。
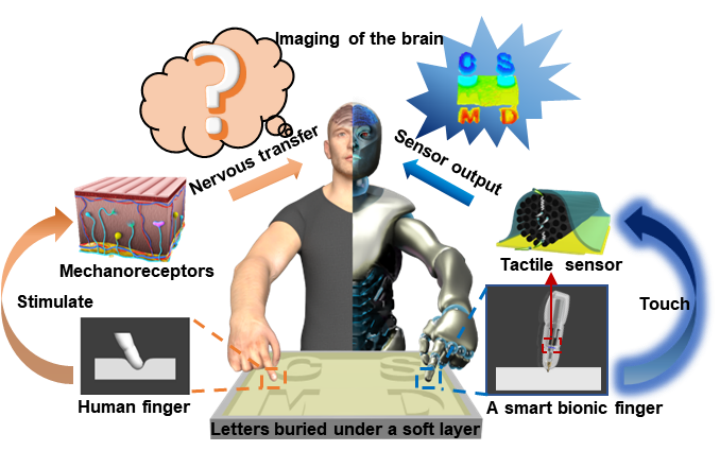
图2 智能仿生手指触觉反馈系统
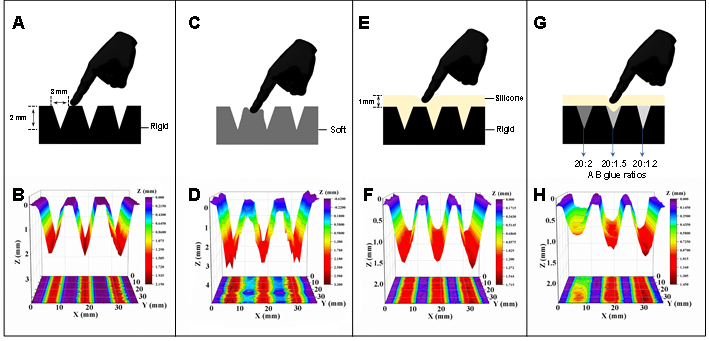
图3 仿生手指的触觉感知 (A)、(C)具有表面周期性条纹的刚性和软材料上扫描的仿生手指示意图;(B)、(D)刚性和软材料的三维深度图和投影图像;(E)在坚硬材料上扫描的仿生手指示意图,上面覆盖着一层柔软的硅胶层,(F)覆盖有软硅层的刚性材料的三维深度图和投影图像(G)在刚性材料上扫描的仿生手指示意图,该材料覆盖了一层柔软的硅胶层,并填充了四种不同比例的AB胶。(H)用柔软的硅胶层覆盖刚性材料,填充20:2、20:1.5、20:1.2四种不同比例AB胶的三维深度图和投影图像。
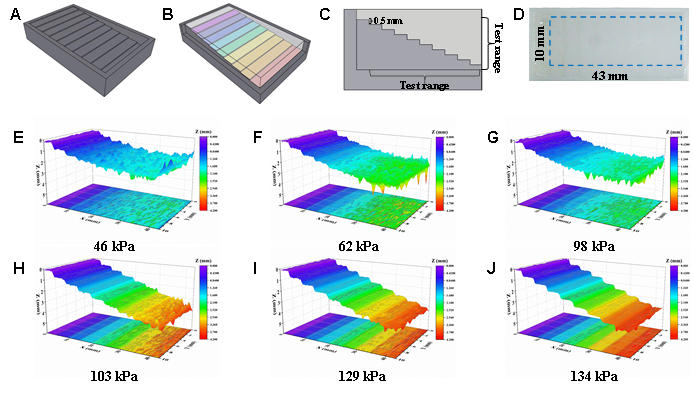
图4 仿生手指的次表面触觉断层扫描 (A)具有下降阶梯表面的刚性材料;(B)带有软硅胶层的降阶刚性材料;(C)下降阶梯物体剖面图;(D)下行阶梯材料扫描区域。(E - J)阈值为(E) 46, (F) 62, (G) 98, (H) 103, (I) 129, (J) 134 kPa时,仿生手指扫描降阶材料的三维深度图和投影图像。
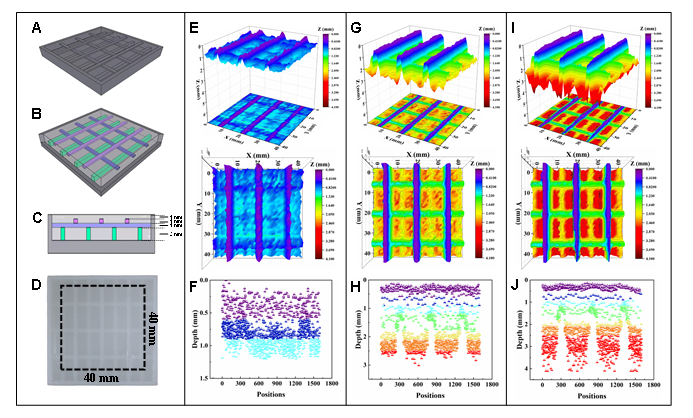
图5 模拟人体皮肤表层下结构触觉层析 (A)正交三层结构的模拟骨架;(B)用软硅酮层覆盖的模拟骨架;(C)被软硅酮层覆盖的模拟骨架剖面图;(D)模拟人体扫描区域;(E, G, I)在阈值为(E) 46, (G) 62,或(I) 134 kPa时,仿生手指扫描模拟人体的三维深度图和投影图像;(F, H, J)阈值(F) 46, (H) 62, (J) 134 kPa下三维相对位置的深度分布。
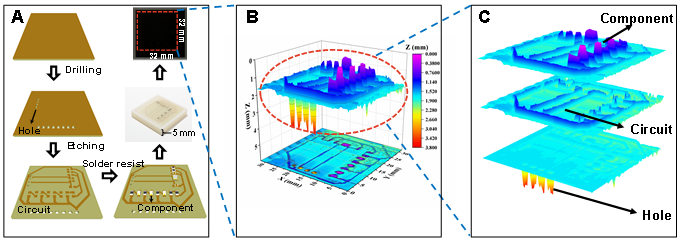
图6 封装柔性电路系统的次表面触觉层析 (A)柔性电路系统的制备过;(B)封装柔性电路系统的三维深度图和投影图像;(C)三维深度图的三层图像。
总结与展望
该研究工作提出了一个具有表层下触觉断层扫描能力的智能仿生手指。这种仿生手指配备了一个集成的触觉反馈系统,使仿生手指能够对力作出定量的反应。为仿生手指设置一系列与力相对应的阈值,以产生一系列逐层的材料内部切片图像,这些切片图像可以揭示和再现具有柔软表层的材料的内部结构。这种针对软体材料表层下的触觉扫描通过重建模拟人体组织和封装的柔性电路系统表面下的三维轮廓进一步得到证明。这种具有表层下触觉断层扫描能力的仿生手指,为人体和柔性电子的无损检测提供了新思路和新方法。
作者及团队介绍
第一作者:李逸洲,男,五邑大学应用物理学院2020级材料与化工硕士研究生。
通讯作者:罗坚义,男,工学博士,教授,博士生导师,现任五邑大学应用物理与材料学院院长,五邑大学柔性传感材料与器件研究开发中心主任(创始人),广东省杰出青年基金获得者,国家重点研发计划智能传感重点专项会评专家,南粤优秀教师, 江门市首届 “侨乡青年榜样”,江门市优秀科技工作者,江门市“十佳教师”。主要研究领域包括:柔性传感材料与器件应用(柔性触觉传感、温度传感、气压传感和弯曲传感等);纳米功能材料合成;智能调光变色材料与器件。
通讯作者:陈智明,男,工学博士,讲师,硕士生导师。2019年毕业于华南理工大学获博士学位,工作以来一直从事柔性传感器的材料开发、器件制备及其应用研究。
附文献及DOI号:
A smart bionic finger for subsurface tactile-tomography.
DOI:10.1016/j.xcrp.2023.101257